

한국연구재단은 오일권(사진) KAIST 교수(기계공학과) 연구팀이 나비가 날개짓 하듯 부드럽게 움직이는 소프트 로봇용 인공근육을 개발했다고 21일 밝혔다.
기존 로봇은 금속성의 딱딱한 소재로 제작했지만, 소프트 로봇은 천이나 고무 등 부드러운 소재를 이용해 사람의 근육처럼 유연하게 움직이는 것이 특징이다. 접촉 대상에 미치는 충격·손상을 줄일 수 있어 유연한 내시경이나 수술용 바늘 등에 쓰거나 탐사·재난구조·제조 등 분야에 쓸 수 있다.
디즈니 애니메이션 ‘빅 히어로’에 등장하는 주인공 ‘베이맥스’는 공기압을 이용해 부풀리고 움직임을 유도하는 공압식 소프트 액츄에이터를 쓴다. 최근 이를 상용화하려는 연구가 활발하지만, 제품의 크기가 크고 무거우며 소모전력이 큰 단점이 있다.
이를 개선할 수 있는 것은 낮은 전압과 전력으로 구동하며 동시에 실제 생물체의 움직임을 형상화한 이온성 소프트 액츄에이터다.
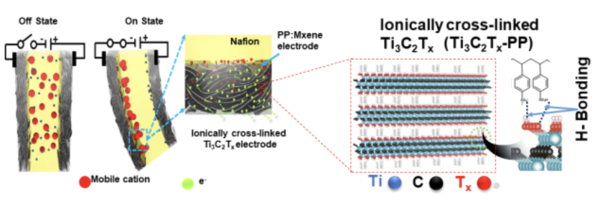
기존 이온성 소프트 액츄에이터를 적용한 인공근육은 수명이 짧고 안정성이 낮아 공학적으로 쓰기 어려웠다. 오 연구팀이 만든 인공근육은 금속처럼 전기가 잘 흐르고, 표면의 기능성을 제어할 수 있는 차세대 나노물질 ‘맥신’(2차원 나노물질 중 하나)을 전극 소재로 썼다. 맥신을 전도성 고분자와 결합해 부드러운 유연전극을 만들면 1V도 이하 낮은 전압으로 마치 문어의 다리처럼 180도 정도쯤 굽힐 수 있다.
오일권 교수는 "기존 인공 근육의 낮은 굽힘 변형률이나 짧은 구동 수명의 한계를 극복한 제품을 만들었다"며 "향후 소프트 로봇, 자연모사 로봇, 웨어러블 플랫폼, 헬스케어 전자기기, 능동형 생체의료 디바이스, 움직이는 예술소품 분야 등 분야 발전에 크게 기여할 수 있을 것이다"고 말했다.